陳瑄易 副教授 | 電機工程學系
陳瑄易副教授自2010年7月取得博士學位後,隨即進入工業技術研究院任職研發工程師,帶領研發團隊開發多項先進車載控制及駕駛行為分析技術,並獲得11項國內外發明專利。2014年2月起,轉任教本校電機系,研究領域包括智慧型控制理論發展、機電整合、多軸運動平臺應用與複合電力電能管理。陳瑄易副教授曾獲得校內108年度產學合作績優獎、109年度教學優良獎以及科技部108年度吳大猷先生紀念獎、中國電機工程學會109年度優秀青年電機工程師獎。

【本篇報導由電機工程學系 陳瑄易教授研究團隊提供】
本研究目標為開發一種智慧型分數階倒階控制器,以控制永磁線性同步馬達的動子位置。本研究以磁場導向控制的方法分析馬達的工作原理與動態行為,之後,為提高傳統倒階控制器的響應速度和控制精度,新設計了分數階倒階控制器。由於引入分數階微分與積分的技術,此控制器在參數的設計上具有更多的自由度。但由於系統存在不確定性,難以設計控制器的參數。故本研究提出一種智慧型分數階倒階控制器,以進一步提高分數階倒階控制器的適應性和強健性,在此控制器中,另外提出了一種基於Hermite多項式的函數鏈結模糊類神經網路作為不確定性估測器,可以直接估測系統不確定性,從而提高抑制外部干擾能力,並且不需要不確定性項之限制條件。此外,為了補償估測器引入的估測誤差,本研究設計了一種採指數自調節機制之指數補償器。最後,利用李雅普諾夫定理推導適應定律,以即時調整控制參數。實驗結果顯示,相較於傳統的倒階控制器和分數階倒階控制器,本研究所提出之智慧型分數階倒階控制器確實具有較佳的定位性能。
永磁線性同步馬達(Permanent Magnet Linear Synchronous Motor, PMLSM)為直驅(Direct Drive)系統如圖一所示,相較於旋轉式馬達是透過齒輪、皮帶及滾珠螺桿等傳動機構,間接地將旋轉運動轉換為直線運動,PMLSM無齒輪間隙且緊湊的機械結構,具有較小的摩擦力、較高的推力密度、更高的速度和較低的熱損耗等優勢,目前已被廣泛應用於定位平臺、機床、半導體產線與運輸系統等場合。但由於電樞繞組,驅動系統和機械機構的控制特性會在使用過程中受到溫度、速度、負載以及機械共振等方面的干擾,進而影響定位與速度精度,因此PMLSM屬於非線性時變敏感系統。為了滿足高精度位置與速度控制之需求,必須在控制系統的設計中有效地估測這些因參數變化與外來影響所造成的問題,才能確保PMLSM位置與速度之控制性能。
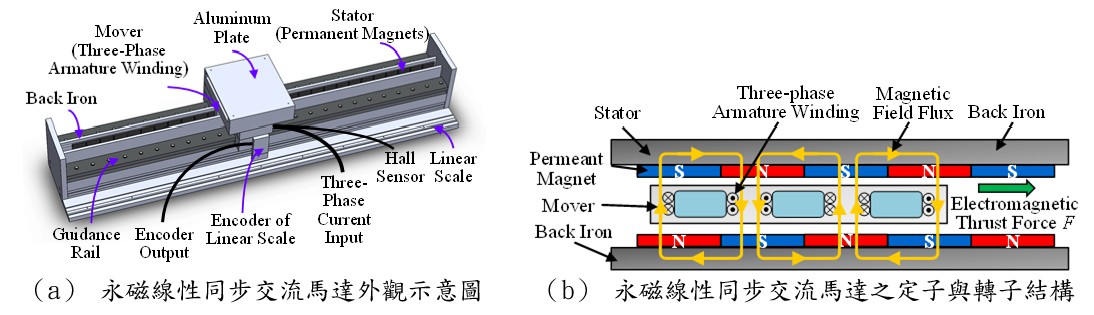
圖一:永磁線性同步交流馬達外觀與內部結構
倒階控制(Backstepping Control, BC)將復雜的非線性系統分解為許多子系統,透過遞迴選擇一些合適的狀態變數函數作為整個系統的低維子系統的虛擬控制變量,當完成所有子系統的控制變量設計時,再將所有Lyapunov函數合併以求得最終的實際控制訊號,確保整個系統的穩定性。然而,BC的問題是必須事先知道確切的系統動力模型與參數,內部的系統參數變化或任何外部干擾都可能導致系統不穩定,因此,近年來,許多專家學者均朝向設計自適應或智慧型BC,以獲得良好的控制性能,並減輕不確定性對系統的不良影響。
模糊類神經網絡(Fuzzy Neural Network, FNN)結合類神經網路的學習能力與模糊系統的思維能力,迄今已廣泛應用於解決如控制、建模和分類等問題,而為提高FNN的學習效率和性能,許多新的學習算法和獨特的網路結構被相繼提出,例如:Probabilistic FNN、Wavelet FNN、Perturbed FNN與Type-2 FNN等等。與上述結構相比,函數鏈接模糊類神經網絡(Functional-Link FNN, FLFNN)是將函數鏈接神經網絡(Functional-Link Neural Network, FLNN)的概念與模糊系統結合,由於FLFNN的後件部是輸入變量的非線性組合,因此與傳統的FNN相比,可以加快收斂速度並降低計算複雜度。此外,為了進一步增強傳統FLNN的學習能力,一些研究人員將注意力集中在各種擴展函數之性能比較,例如使用三角函數、Chebyshev多項式與Hermite函數等等,雖然已有一些研究表明使用Hermite函數的FLNN具有良好的學習能力,但是目前尚未有將FLNN與Hermite函數一起應用於實際控制工程問題之前例;另一方面,儘管某些FNN使用Hermite函數作為歸屬函數以減少訓練時間,但這卻將導致FNN的可解釋性(Interpretable)受到破壞,因此,為了在保持FNN特性的同時提高FLNN的建模性能和學習效率,本研究提出了一種新的基於Hermite多項式的FLFNN(HFLFNN),它結合了FNN,FLNN和Hermite函數的優點,其架構如圖二所示。
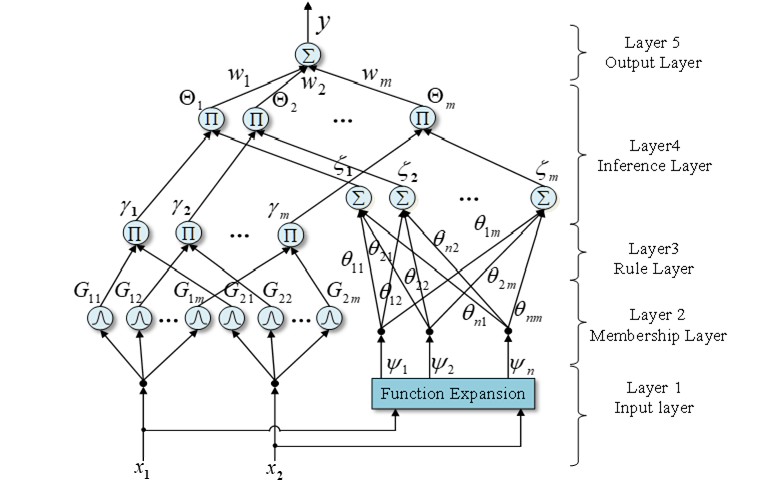
圖二:採用Hermite多項式作為函數展開之HFLFNN
本研究為PMLSM提出了一種新的智慧型分數階倒階控制器(Intelligent Fractional-Order Backstepping Controller, IFOBC),該控制策略能在不確定性因素影響下,精準地控制PMLSM的動子位置,其系統架構如圖三所示,在此架構中,利用HFLFNN對系統不確定量即時估測,另外以一指數補償器(Exponential Compensator)對估測誤差進行動態補償,系統各項參數均以Lyapunov穩定性定理求得適應性調整法則,以實現具有平滑化自我調節機制的適應律,經實驗證實,相較於傳統的倒階控制策略,控制精度可提升約13.37% ,對於後續PMLSM之實際應用將有顯著之幫助。

圖三:IFOBC控制架構
原文出處:https://www.sciencedirect.com/science/article/pii/S0019057818305317

陳瑄易副教授自2010年7月取得博士學位後,隨即進入工業技術研究院任職研發工程師,帶領研發團隊開發多項先進車載控制及駕駛行為分析技術,並獲得11項國內外發明專利。2014年2月起,轉任教本校電機系,研究領域包括智慧型控制理論發展、機電整合、多軸運動平臺應用與複合電力電能管理。陳瑄易副教授曾獲得校內108年度產學合作績優獎、109年度教學優良獎以及科技部108年度吳大猷先生紀念獎、中國電機工程學會109年度優秀青年電機工程師獎。