賀耀華 教授 | 資訊工程學系
2001年、2002年和2009年從美國中央佛羅里達大學(University of Central Florida)取得計算機科學學士、碩士和博士學位,現任國立臺灣師範大學資訊工程學系的教授。他發表過許多論文,並曾在多個國際會議上被譽為最佳論文獎。目前的研究興趣涵蓋人工智慧物聯網(AIoT)、環境感知、大數據分析、無線網絡(WLAN/感測器/車輛/移動自組網)、網絡協議、社交網絡、影像分析、運動科學等。

【本篇報導由資訊工程學系 賀耀華教授研究團隊提供】
在現今空氣污染日益嚴重的情況下,如何快速、準確地找出污染來源,成為環境監測中的一大挑戰。現有的固定式環境監測站雖能量測空氣中的PM2.5(細懸浮微粒)濃度,但由於位置固定、覆蓋範圍有限,往往只能顯示「哪裡空氣不好」,卻無法準確指出污染「從哪裡來」。
為了解決這個問題,本研究提出一種結合無人機(UAV)與 PM2.5 感測技術的污染源搜尋方法。透過在無人機上搭載 PM2.5 感測器,讓無人機能夠在空中靈活飛行,並即時蒐集空氣品質數據。這些數據經由本研究提出的演算法即時分析,進而動態調整無人機的飛行方向與高度,讓它能循著污染的濃度變化,快速找出污染的真正來源。
實驗結果顯示,這套系統能在二十分鐘內成功定位污染源,且誤差小於兩公尺,展現了極高的準確性與實用性。這項技術的發展,突破了傳統監測的限制,讓污染源的搜尋不再受地點與氣候條件影響,提供了更靈活且精確的解決方案。
本研究不僅為污染源監測提供了全新的技術途徑,也為智慧環境監控與智慧城市的發展奠定了基礎。未來,這項技術可望應用於工業區排放監測、交通污染追蹤,甚至環境災害的即時應變,為人類打造更乾淨、更安全的生活環境。
在我們的城市裡,細懸浮微粒(PM2.5)是空氣污染中最棘手的問題之一。它的來源可能來自工廠排放、交通廢氣或焚燒行為,但要精準找到「污染源」卻並不容易。傳統的空氣品質監測站雖能長期記錄濃度變化,卻受限於地點固定與監測範圍有限,往往只能告訴我們「哪裡空氣不好」,卻無法回答「污染從哪裡來」。
本研究團隊為此設計了一套結合無人機與PM2.5感測技術的智慧搜尋系統,讓無人機成為在空中「嗅探污染」的偵查員。利用現有的環境感測網(如環境部的空氣品質監測網或是由民間社群自發LASS感測網路)提供的空氣品質數據,引導無人機根據風向自下風處起飛,沿著煙羽擴散方向前進,一邊飛、一邊即時分析濃度變化,再自動調整搜尋方向與採樣間距。這樣的過程,就像一位會思考的空氣偵查員,不斷修正自己的搜尋路線,逐步逼近污染源(如圖一、圖二)。
為了讓搜尋更有效率,本研究開發了三種搜尋策略:貪婪(Greedy)演算法負責沿著濃度梯度精準前進;動態(Dynamic)演算法則依濃度變化調整移動速度與採樣頻率;混合(Hybrid)演算法結合兩者的優勢,能快速鎖定目標後再精細定位。
為驗證方法的有效性,本研究以高斯煙羽模型(Gaussian Plume Model)模擬真實的污染擴散情境(如圖三),並考量風速、風向、感測誤差與背景雜訊等因素。模擬結果顯示,三種演算法均能在20分鐘內將污染源定位誤差控制在2公尺以內,在效率與準確度上均明顯優於傳統的隨機或區域填充搜尋方法,其中混合演算法展現出最佳的平衡性與穩定性。
進一步的實驗亦證實,三種演算法在不同的排放強度、濃度分布與搜尋區域大小條件下皆具良好的適應性,並可透過多次搜尋或多無人機協作進一步降低誤差。同時,本研究也分析了感測器安裝位置對讀值準確度的影響,並運用濾波技術有效降低雜訊、提升數據品質。
此外,研究亦納入現實環境的多種變因,如風速、風向改變、感測誤差與雜訊干擾,並使用濾波技術來改善數據品質,提升數據穩定性。結果顯示,不論是不同的排放強度、濃度分布,或是更大範圍的搜尋場域,系統都能靈活調整、維持良好的搜尋表現。
這項成果不僅提供了一種即時、可行、精準的PM2.5污染源定位方案,也展現了無人機在智慧環境監控中的巨大潛力。未來,將持續拓展此技術,讓無人機能同時偵測多個污染源、進行多機協作搜尋,甚至結合地形與氣流模型,進一步提升搜尋準確度。整體而言,本研究成功整合感測網絡資料、氣象參數與智能搜尋演算法,在污染源定位上展現出高精度與高效率,為智慧環境監測提供具擴展性的解決方案,也為無人機在環境監測與城市治理領域開啟了新的應用契機。
這項研究不只是為了解決「哪裡的空氣不好」,更重要的是找到污染的真正源頭,從根本改善空氣品質。
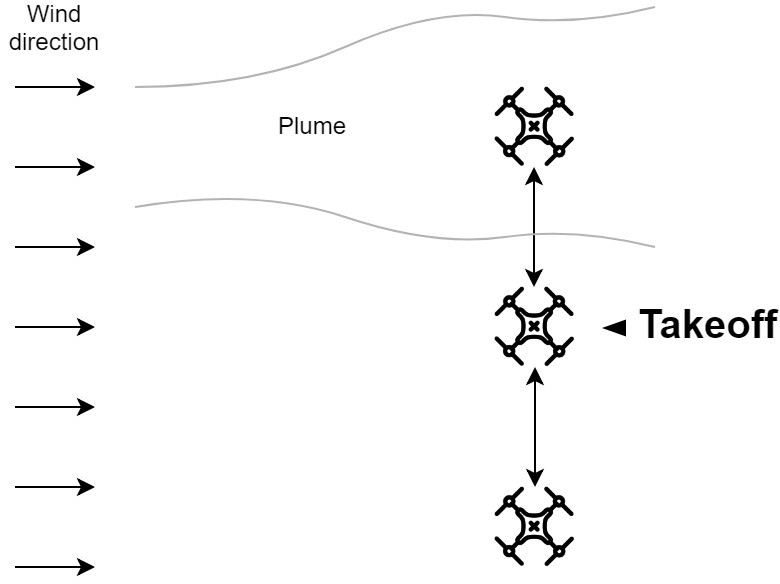
圖一:初始起點與煙羽量測示意圖
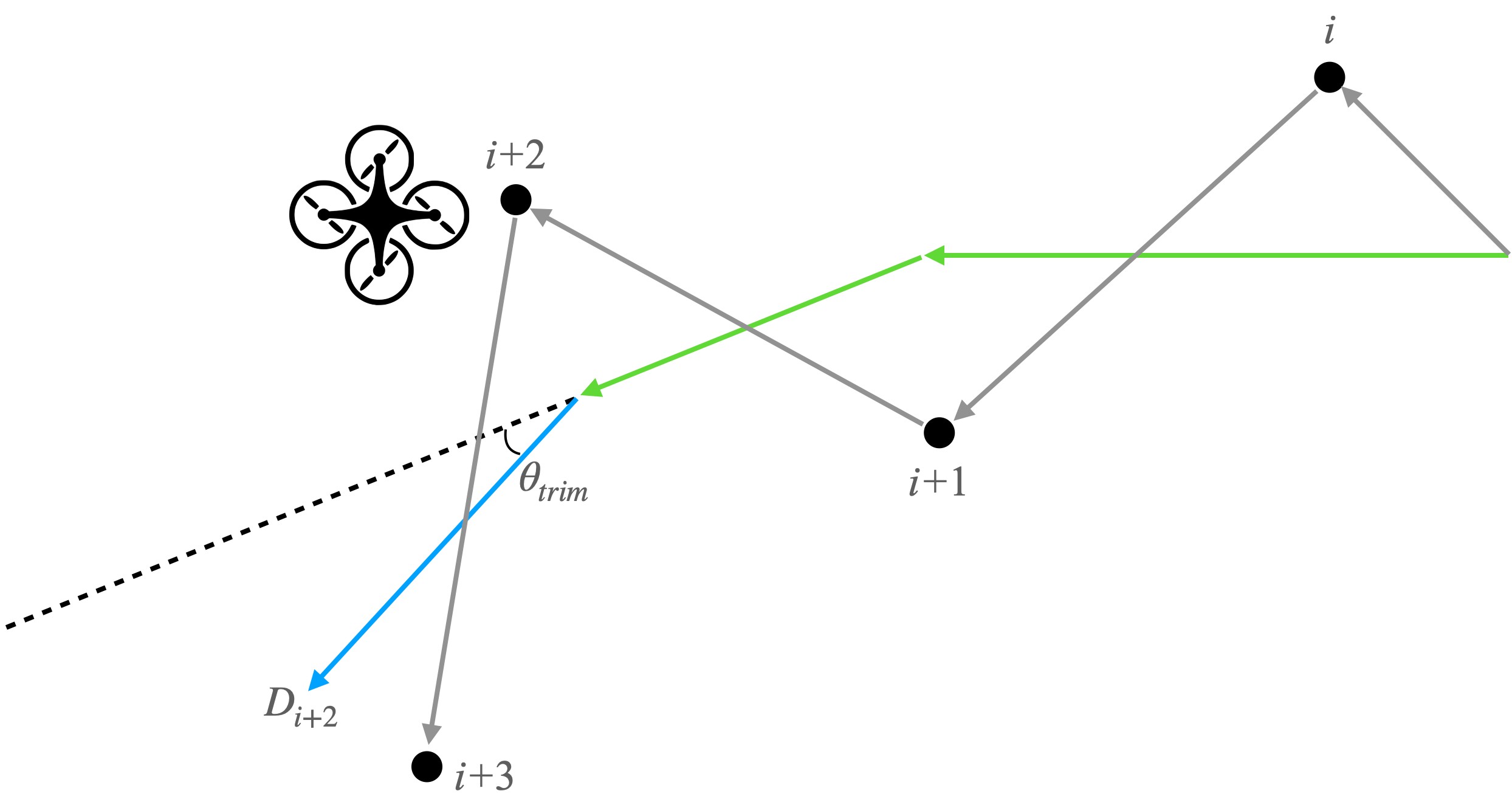
圖二:搜尋路徑的方向會根據各感測點的 PM2.5 濃度量測結果進行調整,使無人機能朝向濃度較高的方向飛行,逐步接近污染源位置。
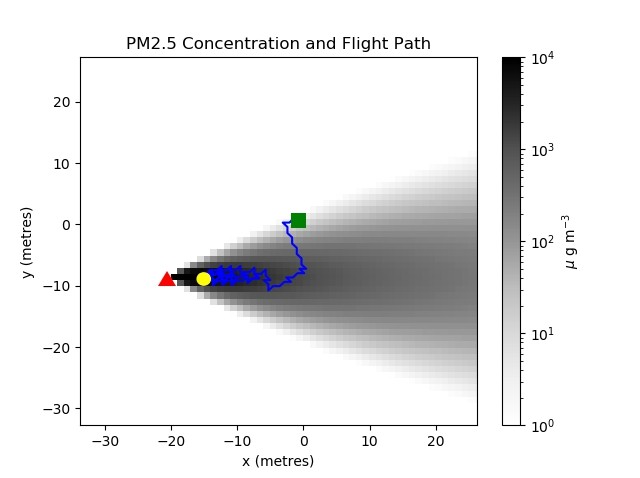
圖三:高斯煙羽模型(Gaussian Plume Model)模擬真實的污染擴散情境,紅色三角形代表排放源,灰色區域為煙羽擴散範圍,灰色越深表示PM2.5濃度越高。綠色方形為搜尋飛行路徑的起點,黃色圓形為預估的排放源位置,藍色線條則表示搜尋路徑。
原文出處:
Ho, Y. H., & Lin, Y. C. (2024). Searching for the fine particulate matter (PM 2.5) pollutant emission source using a drone. Measurement: Journal of the International Measurement Confederation, 232, 114726. https://doi.org/10.1016/j.measurement.2024.114726
(Impact Factor 5.6, and Q1 on both "ENGINEERING, MULTIDISCIPLINARY" and "INSTRUMENTS & INSTRUMENTATION")

2001年、2002年和2009年從美國中央佛羅里達大學(University of Central Florida)取得計算機科學學士、碩士和博士學位,現任國立臺灣師範大學資訊工程學系的教授。他發表過許多論文,並曾在多個國際會議上被譽為最佳論文獎。目前的研究興趣涵蓋人工智慧物聯網(AIoT)、環境感知、大數據分析、無線網絡(WLAN/感測器/車輛/移動自組網)、網絡協議、社交網絡、影像分析、運動科學等。

畢業於國立臺灣師範大學資訊工程學系,取得學士與碩士學位,現任谷歌 Google軟體工程師。他長期投入於高效能分散式系統、資料庫設計與雲端服務優化等領域,擅長運用 Python 與 Rust 開發高可靠性的軟體系統。







