江府峻 教授 | 物理學系
1997年畢業於國立臺灣大學物理系,並在2006年拿到美國北卡杜克大學的博士學位。2006年至2009年在瑞士伯恩大學物理研究所擔任博士後研究。在2010年加入臺師大物理系之前,曾在美國麻省理工學院擔任資深博士後研究一年。研究興趣為強相關聯系統及機器學習在物理上,特別是相變上的應用。

【本篇報導由物理學系 江府峻教授研究團隊提供】
本研究構建了一個可以計算關於相變實驗中之臨界點的通用監督式類神經網絡(NN)。為了檢驗這個監督式類神經網絡的有效性,研究團隊用它來計算幾個三維(3D)和二維(2D)模型的臨界點,這些模型包括3D經典O(3)模型、3D 5-狀態鐵磁Potts模型、3D二聚化量子反鐵磁海森堡模型和2D XY模型。特別是,雖然研究團隊所建構的NN只在具有120個位點的一維(1D)晶格上訓練了一次,但它成功地計算出我們所研究的這些系統的臨界點。更重要的是,這個NN的預測並不是使用整個真實的物理狀態來執行,而是根據模型的塊材資料或自旋狀態來建構在120個位點的一維晶格上的組態來做相關的預測計算。因為這些技巧,本研究的計算效率是極高的,且所構建的神經網絡在研究物理系統相變中的應用是極其廣泛。令人驚奇的是,雖然研究團隊所研究的系統彼此之間的差異甚巨,但是在訓練NN及用NN做預測所使用的策略得到了一個適用於許多3D和2D模型的高度通用監督式類神經網絡。根據本研究結果的顯示,很有可能在臨界現象以外的物理多體系統也可以構建出簡單但優雅的機器學習技術。
近年來,利用人工智慧的技巧來研究基礎科學的題材蔚為風潮,在物理上,也是如此。在人工智慧的技巧中,類神經網絡被應用於研究及辨識物體中不同的態及這些態之間的相變,許多的研究成果證明了這樣的策略是成功且有效的。
在運用類神經網絡於研究物理態之間的相變之前,需要訓練類神經網絡。而傳統上類神經網絡的訓練是用真實的物理態來做訓練,這樣的訓練方式不但耗時,訓練好的類神經網絡也只適用於所訓練的系統。每當要研究新的系統時,就要重新做一次完整的訓練,特別是適用於某個系統的類神經網絡架構並不一定也適用於別的系統。
鑒於這些困難阻礙了類神經網絡的實際應用,在本研究中,研究團隊採取了不一樣的策略。特別是,建構了只在具有120個位點的一維(1D)晶格上訓練了一次的監督式類神經網絡(如圖一)。有別於傳統的方式,不用真實的物理組態來做訓練,而是用兩個人造簡單的組態來當做訓練集,這樣的作法大大的減少訓練類神經網絡所需的時間。而用這個類神經網絡來做預測的測試集也並不是使用整個真實的物理狀態來執行,而是根據模型的塊材資料或自旋狀態來建構在120個位點的一維晶格上的組態來做相關的預測計算,所以跟傳統的方法比較,本研究的類神經網絡做預測的計算也是快了很多。
本研究將所訓練的類神經網路拿來計算包括3D經典O(3)模型、3D 5-狀態鐵磁Potts模型、3D二聚化量子反鐵磁海森堡模型和2D XY模型等系統的臨界點,結果十分準確。雖然所研究的系統彼此之間的差異甚巨,但是在訓練類神經網路及用類神經網路做預測所使用的策略得到了一個適用於許多3D和2D模型的高度通用監督式類神經網絡。跟傳統的類神經網絡相比,本研究團隊所建構的類神經網絡架構,不但計算速度快上許多,也可直接拿來用於不同維度的許多模型。
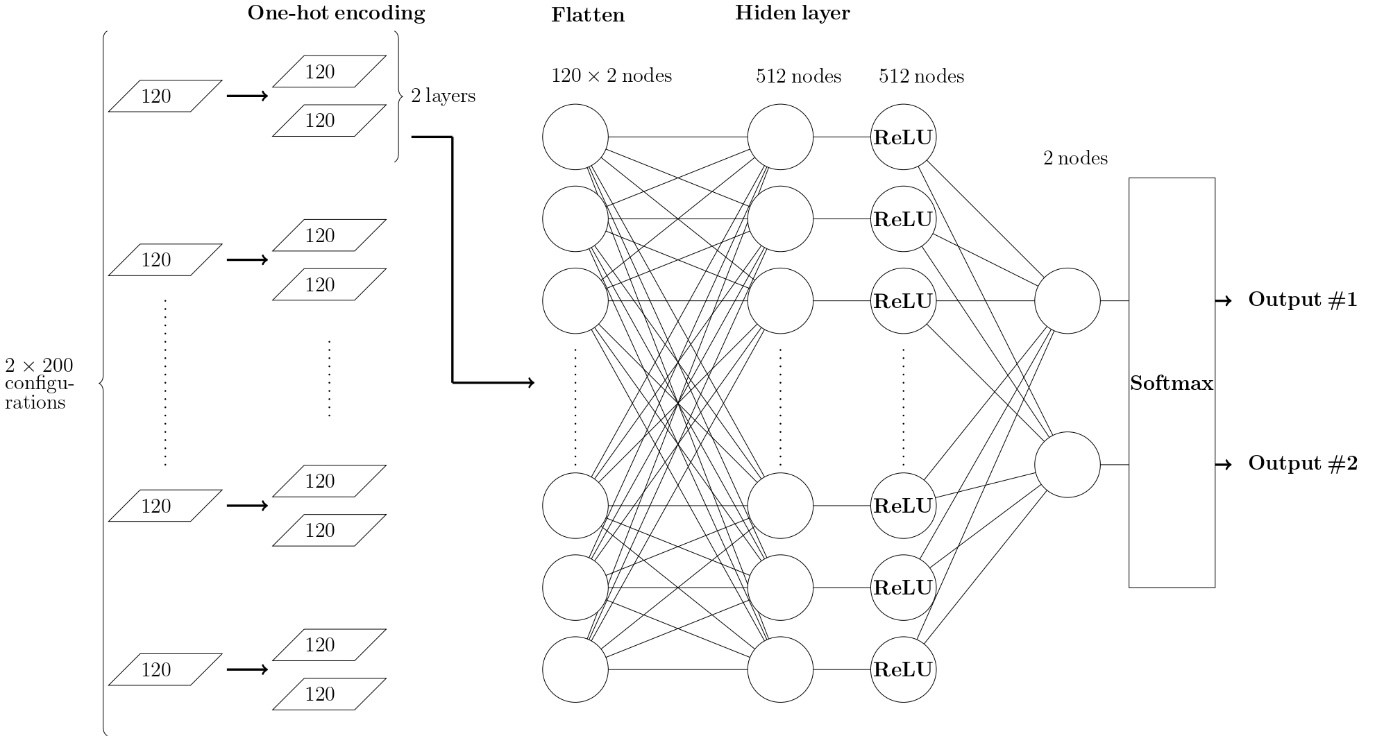
圖一:本研究所構建的監督式類神經網絡。
原文出處:
Tan, D. R., Peng, J. H., Tseng, Y. H., & Jiang, F. J. (2021). A universal neural network for learning phases. European Physical Journal Plus, 136(11), [1116]. https://doi.org/10.1140/epjp/s13360-021-02121-4

1997年畢業於國立臺灣大學物理系,並在2006年拿到美國北卡杜克大學的博士學位。2006年至2009年在瑞士伯恩大學物理研究所擔任博士後研究。在2010年加入臺師大物理系之前,曾在美國麻省理工學院擔任資深博士後研究一年。研究興趣為強相關聯系統及機器學習在物理上,特別是相變上的應用。